5 Создание крутящего момента каретки Через две спиральные пружины на подвижную катушку подается ток. Когда ток I протекает через подвижную катушку, возникает вращающий момент. Ф Б О Н С О Ф
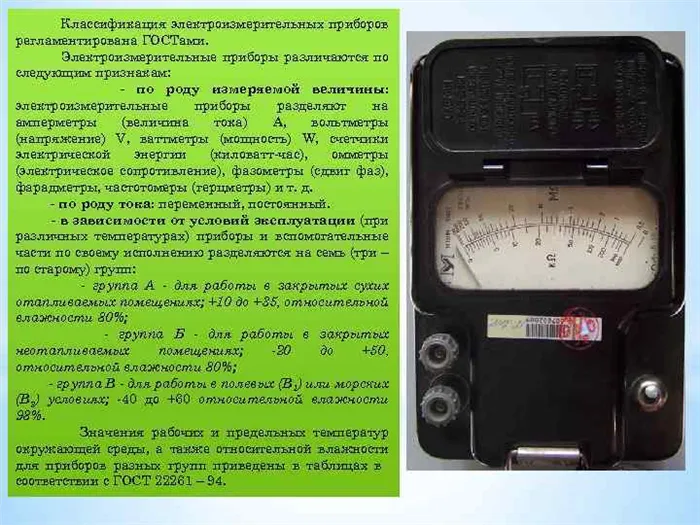
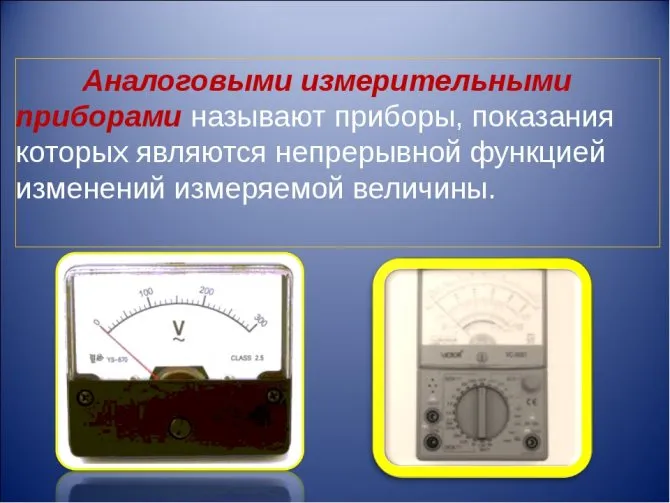
Магнитоэлектрические приборы. Принцип действи, достоинства, недостатки, область применения.
ПредыдущаяПредыдущий пункт 5 из 10 Следующая⇒
В магнитоэлектрическом механизме крутящий момент создается за счет взаимодействия постоянного тока в катушке механизма с полем постоянного магнита. Существует два основных типа магнитоэлектрических систем: Подвижная рамка (подвижная катушка) и вращающийся соленоид, причем первый используется гораздо чаще, чем второй.
Принцип действия магнитоэлектрических устройств основан на взаимодействии магнитного поля постоянного магнита и катушки с током. В воздушном зазоре 1 (рис. 7.1) между неподвижным стальным цилиндром 2 и полюсными клеммами NS неподвижного постоянного магнита находится алюминиевый каркас с обмоткой 3, состоящей из w витков изолированного провода.
Рама жестко связана с двумя полуосями O и O’, которые поддерживаются на своих концах. К полуоси O прикреплены стрелка указателя 4 и две винтовые пружины 5 и 5′, через которые измеряемый ток I и противовесы 6 соединены с катушкой. Концы полюсов NS и стальной цилиндр 2 создают в зазоре 1 однородное радиальное магнитное поле с индукцией В. Взаимодействие магнитного поля с током в проводниках катушки 3 создает вращающий момент. Каркас катушки вращается, и стрелка отклоняется на угол a. Электромагнитная сила Fem, действующая на катушку, равна Fem = wBlI.
Крутящий момент, создаваемый силой Fem,
Читайте также. Что такое омметр?
Mvr = Femd = wBlId = C1I1,
Поворот рамы компенсируется спиральными пружинами 5 и 5′, которые создают компенсирующий момент, пропорциональный углу поворота α:
Где C2 — коэффициент, зависящий от жесткости пружин.
Индекс располагается в определенном диапазоне шкалы, когда моменты равны
Mvr = Mpr, т.е. когда C1I = C2a. Угол поворота индикатора
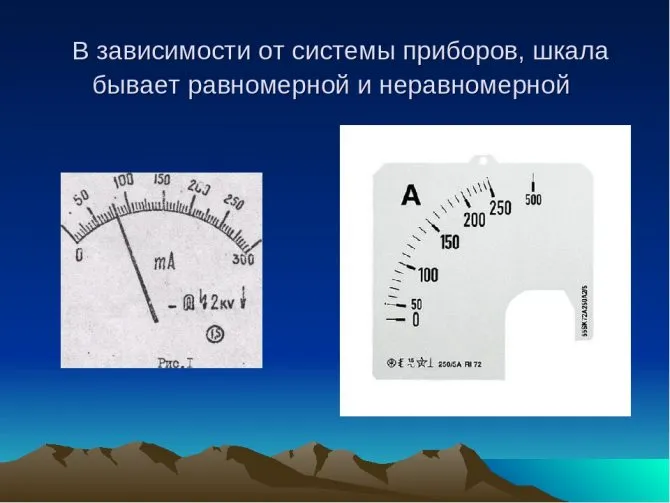
C2 пропорциональна силе тока. Следовательно, магнитоэлектрические приборы имеют равномерную шкалу, что является преимуществом.
Направление вращающего момента (определяемое по правилу левой руки) изменяется при изменении направления тока. Когда магнитоэлектрический прибор подключен к цепи переменного тока, катушка подвергается воздействию быстро меняющихся механических сил, среднее значение которых равно нулю. В результате игла прибора не отклоняется от нулевого положения. Поэтому эти приборы нельзя использовать непосредственно для измерений в цепях переменного тока.
Преимущества магнитоэлектрической системы: точность, низкая чувствительность к посторонним магнитным полям, низкое энергопотребление, равномерность шкалы. Недостатками являются необходимость использования специальных приборных трансформаторов для измерений в цепях переменного тока и чувствительность к перегрузкам (тонкие 5 и 5′-фосфорные медные токовые пружины нагреваются и изменяют свои упругие свойства при перегрузке).
15. электромагнитные устройства, принцип действия, преимущества, недостатки, область применения.
Электромагнитные измерители — это класс устройств, используемых для измерения различных электрических величин.
Электродинамический механизм (рис. 4 и 5) состоит из двух катушек — неподвижной А с двумя секциями и подвижной В, которая находится на одной оси со стрелкой указателя, лезвия воздушного ножа В и двух спиральных пружин.
Электродинамический измерительный механизм
Когда ток I
1 в неподвижной катушке и ток I 2 в подвижной катушке, между ними возникает электродинамическое взаимодействие. В результате на звуковую катушку действует пара сил FF (рис. 4), т.е. крутящий момент. Звуковая катушка вращается до тех пор, пока вращающий момент не уравновесится противоположным моментом пружин.
При постоянном токе вращающий момент и угол поворота подвижной катушки пропорциональны произведению токов катушек. При переменном токе
Рисунок 4. Электродинамическое движение
Рисунок 5. Создание крутящего момента в электродинамическом движении
Крутящий момент и соответствующий угол поворота подвижной катушки определяются произведением значений токов в катушках и косинуса угла сдвига между ними.
Отсутствие стали в измерительном механизме и, следовательно, остаточных индукционных погрешностей позволяет разрабатывать эти механизмы для высокоточных измерений.
Для уменьшения погрешностей из-за внешних магнитных полей, вызванных слабым магнитным полем механизма, используются те же средства, что и для электромагнитных механизмов.
Поскольку слабое магнитное поле связано со слабым крутящим моментом, для достижения высокой точности необходимо уменьшить ошибки трения. Это достигается за счет снижения веса подвижной части и качественной обработки валов и подшипников. Кроме того, поперечное сечение пружин и проводов звуковой катушки невелико, поэтому электродинамическое движение чувствительно к перегрузкам.
Электродинамические и электромагнитные измерительные приборы





Электромагнитные измерительные приборы
2 Электромагнитные измерительные приборы
Характерной особенностью электромагнитных приборов, определяющей их широкое применение для измерений в цепях переменного и постоянного тока в качестве амперметров и вольтметров, являются их высокие функциональные свойства: простота конструкции, низкая стоимость, высокая надежность, устойчивость к электрическим перегрузкам, широкий диапазон измерений. Основным недостатком этих приборов является их низкая точность (бытовые электромагнитные приборы выпускаются с классом точности до 0,5).
Все электромагнитные устройства можно разделить на резонансные и нерезонансные в зависимости от их конструкции и типа движения подвижной части. Каждая из этих групп устройств в свою очередь делится на две подгруппы: поляризованные и неполяризованные устройства (поляризованные устройства используют постоянные магниты в дополнение к магнитной катушке). Поскольку электромагнитные резонаторы в настоящее время используются очень редко, в данном руководстве они не рассматриваются. Здесь рассматриваются только неполяризованные, нерезонансные электромагнитные преобразователи, которые наиболее часто используются в электроизмерительной технике. В основе этих устройств лежат электромагнитные измерительные механизмы, которые отличаются как по конструкции, так и по своим свойствам и параметрам.
Принцип действия всех электромагнитных преобразователей основан на взаимодействии магнитного поля тока, протекающего в катушке, с ферромагнитным сердечником.
Электромагнитные преобразователи могут быть сконструированы так, что магнитное поле катушки с током и ферромагнитного сердечника взаимодействуют таким образом, что последний намагничивается и отталкивается от другого твердого сердечника (так называемые преобразователи отталкивания), или так, что магнитное поле катушки с током вызывает притяжение последнего магнитным полем катушки (преобразователи притяжения).
Все электромагнитные преобразователи можно разделить на два основных типа (Рисунок 5).
Читайте также.
Рисунок 5 — Электромагнитные преобразователи
Преобразователи с плоской катушкой (рис. 5, а) состоят из катушки 2, в магнитном поле которой находится ферромагнитный сердечник 1 в виде вырезанного диска или язычка, закрепленного эксцентрично относительно оси подвижной части. Когда в катушке протекает ток, ферромагнитный сердечник втягивается в магнитный зазор катушки, заставляя вал 3 с установленными на нем датчиком 4 и стрелкой 5 вращаться в направлении увеличения показаний. Угол отклонения подвижной части регулируется с помощью магнитного шунта 6. Преобразователи с плоской катушкой технически менее сложны, чем преобразователи с круглой катушкой, но имеют более высокую чувствительность, меньшие размеры и меньший вес.
Преобразователи с круглой катушкой (рис. 5 b) состоят из катушки (1), подвижного сердечника (2) и неподвижного ферромагнитного сердечника (3), форма которого определяется необходимостью сохранения требуемого характера шкалы преобразователя. Когда на катушку подается напряжение, подвижный и неподвижный сердечники намагничиваются с одинаковой намагниченностью. Подвижный сердечник отталкивается от неподвижного и вращается вместе с валом 4 и прикрепленной к нему стрелкой 6. Сила отталкивания прямо пропорциональна силе тока, протекающего через катушку. Противоположный крутящий момент создается спиральной пружиной 5. Подвижная часть опирается на крыло, состоящее из закрытой камеры 7 и легкого алюминиевого крыла 8, которое прочно соединено с валом 4 подвижной части. Преимуществом этих преобразователей является их простота, высокая технологичность и возможность получения желаемого характера шкалы (путем выбора формы сердечника). Структурно ядра могут иметь цилиндрическую, призматическую или иную форму). Чувствительность этих преобразователей ниже, чем у преобразователей с плоской катушкой.
Если у вас нет времени читать, просто посмотрите видео. Мы хотели бы уточнить, что эта информация также относится к велотренажерам, эргометрам и другим тренажерам с маховиком. На основе системы зарядки маховика различают следующие типы:
Самая простая система. Это самый простой тип; принцип работы следующий: вокруг маховика натягивается ремень, и за счет изменения натяжения достигается изменение нагрузки на маховик. Основные недостатки тренажеров с такой системой загрузки — высокий рабочий шум, отсутствие возможности корректировки программы тренировки, простой микрокомпьютер. Единственное преимущество — низкая цена. Но не забывайте, что скупой платит дважды.
- Механическая
- Магнитная с ручной регулировкой
- Магнитная с электронной регулировкой
- Электромагнитная
Магнитная система зарядки
В магнитной системе нагрузки элементом, создающим нагрузку, является постоянный магнит. Интенсивность нагрузки регулируется путем изменения расстояния между магнитом и маховиком, т.е. путем изменения воздействия магнита на маховик. Он доступен как в ручном, так и в электронном виде.
Ручная регулировка
Ручная регулировка веса требует установки сопротивления вручную путем поворота специального регулятора веса, который, в свою очередь, перемещает магнит ближе или дальше от маховика. Он используется в более дешевых, простых моделях фитнес-оборудования.
Отсутствие программ обучения Громкий щелкающий звук при переключении
Дешевле, чем электрические модели Не нужно подключать к розетке
Подобная система используется, например, в аппарате Oxygen Tornado II EL.
Совет:

Его можно быстро узнать по круглой ручке на подставке.
Электронная регулировка сопротивления позволяет изменять уровень сопротивления с помощью компьютера на орбитреке; это возможно благодаря серводвигателю (небольшой мотор, который изменяет расстояние до вращающегося маховика). Это более современная и технологичная система загрузки, чем механические или ручные соленоидные системы. Помимо установки уровня нагрузки, можно также использовать встроенные программы тренировок.
Электронная регулировка
Hasttings DRE20 имеет именно такую программу.
Измерительный механизм является наиболее важной частью любого измерительного устройства. Когда механизм активируется измеряемой или связанной с функцией вспомогательной переменной, его подвижная часть перемещается. Угол поворота или линейного перемещения подвижной части определяет значение измеряемой величины.
Измерительные механизмы приборов
Подвижная часть магнитоэлектрического счетчика (рис. 1) состоит из прямоугольной катушки (каркаса) В. Обмотка каркаса из тонкого изолированного медного провода закреплена на алюминиевом каркасе. Рама опирается на две полуоси — сердечники, установленные на кронштейнах. К одной из полуосей прикреплена стрелка и концы витковых пружин, которые подают энергию на обмотку рамы.
Рисунок 1: Магнитоэлектрическое движение
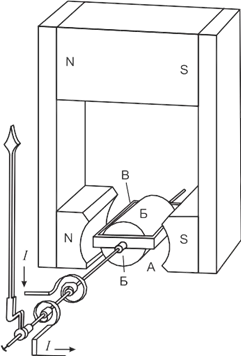
Стороны рамы расположены в узком воздушном зазоре A между неподвижным стальным цилиндром B и полюсными башмаками N, S. Сильный постоянный магнит N-S создает однородное радиальное магнитное поле в воздушном зазоре.
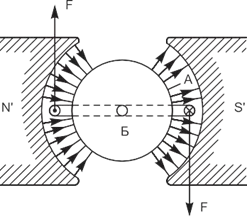
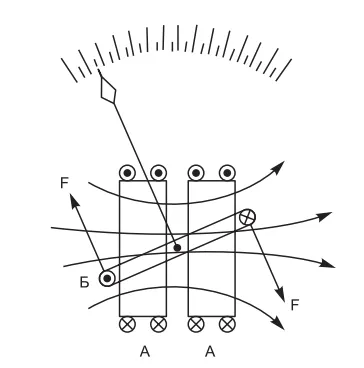
Пара сил F, F действует на стороны рамки, находящиеся в магнитном поле, когда в обмотке течет ток (рис. 2). Таким образом, создается вращающий момент, который пропорционален току в рамке. Под действием этого момента рама поворачивается на угол α, при котором момент уравновешивается компенсирующим моментом пружин. Последняя пропорциональна углу поворота пружин. Угол поворота рамки пропорционален силе тока.
Рисунок 2. Генерация крутящего момента в магнитоэлектрическом механизме.
Демпфер — это устройство, используемое для уменьшения времени вибрации подвижной части, возникающей после срабатывания устройства. В движущемся железном механизме демпфером является алюминиевая рама шасси. При вращении подвижной части магнитный поток через рамку изменяется. В рамке индуктируются токи, и их взаимодействие с магнитным полем магнита создает тормозной момент, обеспечивающий остановку.
Из-за малого сечения пружины и проволоки катушки рассматриваемый механизм рассчитан на малые номинальные токи 10-100 мА и менее.
Если магнитоэлектрический механизм рассматриваемого здесь типа подключен к цепи переменного тока, крутящий момент изменяется в зависимости от мгновенного значения тока. Когда крутящий момент изменяется так быстро, подвижная часть не успевает следовать за изменением крутящего момента из-за инерции и отклоняется на угол, пропорциональный среднему значению крутящего момента за период. При синусоидальном токе среднее значение тока и, соответственно, крутящего момента равно нулю, и подвижная часть не отклоняется. Поэтому рассматриваемый измерительный механизм подходит только для измерений в цепи постоянного тока.
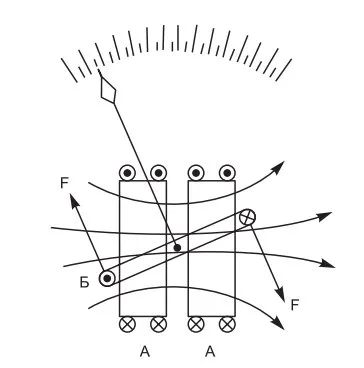
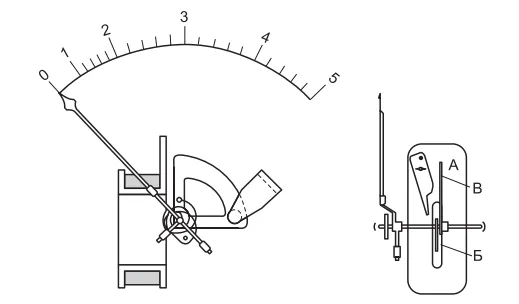
Электромагнитный измерительный механизм показан на рис. 3. состоит из неподвижной катушки А и подвижной части — стального сердечника Б, стрелочного указателя, пружины и секторной алюминиевой фольги В удерживающего устройства, закрепленного на валу.
Электромагнитный измерительный механизм
Измеряемый ток проходит через неподвижную катушку и создает магнитное поле, которое намагничивает стальной сердечник B и притягивает его к катушке. Угол поворота сердечника определяет ток в катушке.
Когда лист B катушки движется в магнитном поле магнита M, в нем индуцируются ветви. Взаимодействие этих токов с полем магнита создает тормозной момент, который обеспечивает покой.
Рисунок 3. Электромагнитное движение
Электромагнитный механизм подходит для цепей постоянного и переменного тока, поскольку сердечник втягивается в катушку независимо от направления тока.
Из-за влияния остаточной индуктивности сердечника потребляемый ток и, следовательно, показания счетчика могут быть разными для одного и того же тока при увеличении тока и при уменьшении тока. Следовательно, из-за остаточной индуктивности может возникнуть ошибка. Чтобы уменьшить эту погрешность, сердечники изготавливаются из пермалоя, остаточная индуктивность которого пренебрежимо мала.
Для уменьшения погрешностей индукции, вызванных внешними полями, измерительный механизм окружен стальными экранами или кожухами. Для этой же цели используются астатические механизмы с двумя последовательно соединенными катушками или с двумя сердечниками на одной оси. Измеряемый ток создает в катушках поля с противоположными направлениями. Внешнее однородное поле уменьшает магнитное поле одной катушки и увеличивает поле второй катушки на ту же величину, так что эффект внешнего поля пренебрежимо мал.
Электродинамический измерительный механизм (рис. 4 и 5) состоит из двух катушек — неподвижной катушки А с двумя секциями и подвижной катушки Б, установленной на валу с центровочной стрелкой, лопатки В устройства воздушного упора и двух витковых пружин.
Электродинамический измерительный механизм
Когда ток I
При постоянном токе вращающий момент и угол поворота подвижной катушки пропорциональны произведению токов катушек. При переменном токе
Рисунок 4. Электродинамическое движение
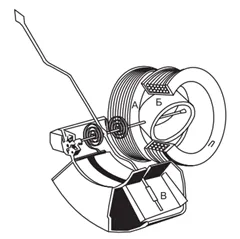
Рисунок 5. Создание крутящего момента в электродинамическом движении
Крутящий момент и соответствующий угол поворота подвижной катушки определяются произведением значений токов в катушках и косинуса угла сдвига между ними.
Отсутствие стали в измерительном механизме и, следовательно, остаточных индукционных погрешностей позволяет разрабатывать эти механизмы для высокоточных измерений.
Для уменьшения погрешностей из-за внешних магнитных полей, вызванных слабым магнитным полем механизма, используются те же средства, что и для электромагнитных механизмов.
Поскольку слабое магнитное поле связано со слабым крутящим моментом, для достижения высокой точности необходимо уменьшить ошибки трения. Это достигается за счет снижения веса подвижной части и качественной обработки валов и подшипников. Кроме того, поперечное сечение пружин и проводов звуковой катушки невелико, поэтому электродинамическое движение чувствительно к перегрузкам.
Электродинамические и электромагнитные измерительные приборы
Самая простая система. Это самый простой тип; принцип работы следующий: вокруг маховика натягивается ремень, и за счет изменения натяжения достигается изменение нагрузки на маховик. Основные недостатки тренажеров с такой системой загрузки — высокий рабочий шум, отсутствие возможности корректировки программы тренировки, простой микрокомпьютер. Единственное преимущество — низкая цена. Но не забывайте, что скупой платит дважды.
- Механическая
- Магнитная с ручной регулировкой
- Магнитная с электронной регулировкой
- Электромагнитная
Механическая (ременная) система нагружения
Магнитная система зарядки
В магнитной системе нагрузки элементом, создающим нагрузку, является постоянный магнит. Интенсивность нагрузки регулируется путем изменения расстояния между магнитом и маховиком, т.е. путем изменения воздействия магнита на маховик. Он доступен как в ручном, так и в электронном виде.
Ручная регулировка
Ручная регулировка веса требует установки сопротивления вручную путем поворота специального регулятора веса, который, в свою очередь, перемещает магнит ближе или дальше от маховика. Он используется в более дешевых, простых моделях фитнес-оборудования.
Отсутствие программ обучения Громкий щелкающий звук при переключении
Дешевле, чем электрические модели Не нужно подключать к розетке
Подобная система используется, например, в аппарате Oxygen Tornado II EL.
Совет:

Его можно быстро узнать по круглой ручке на подставке.
Электронная регулировка сопротивления позволяет изменять уровень сопротивления с помощью компьютера на орбитреке; это возможно благодаря серводвигателю (небольшой мотор, который изменяет расстояние до вращающегося маховика). Это более современная и технологичная система загрузки, чем механические или ручные соленоидные системы. Помимо установки уровня нагрузки, можно также использовать встроенные программы тренировок.
Электронная регулировка
Hasttings DRE20 имеет именно такую программу.
Измерительный механизм является наиболее важной частью любого измерительного устройства. Когда механизм активируется измеряемой или связанной с функцией вспомогательной переменной, его подвижная часть перемещается. Угол поворота или линейного перемещения подвижной части определяет значение измеряемой величины.